Ich möchte in diesem Thread in loser Folge einige meiner Arduino-Projekte vorstellen. Vielleicht regt es ja den einen oder anderen Forumsteilnehmer zum Nachbau an.
Projekt 1: Kameraumschalter
Ich habe in meinem Womo einen chinesischen Navireceiver (Doppel-DIN Autoradio mit Navigationssoftware und Touchscreen) auf Android-Basis. Als serienmäßiges Feature kann man eine rückwärtige Kamera an das Gerät anschließen, deren Bild automatisch auf dem Bildschirm erscheint, wenn der Rückwärtsgang eingelegt wird. Als Steuerungssignal wird dazu ein Kabel an den Rückfahscheinwerfer angeschlossen und mit dem Navireceiver verbunden. Weiterhin gibt es auch einen AV2-Eingang, über den man eine Frontkamera anschließen kann. Deren Signal erscheint, wenn man auf dem Tablet den AV2-Eingang auswählt. Wie in meinem PKW realisiert wollte ich auch im Womo die Funktion haben, dass nach Ausschalten des Rückwärtsganges für eine kurze Zeit (15 sec) automatisch auf die Frontkamera umgeschaltet wird. Diese Funktion ist sehr hilfreich, wenn man z.B. aus engen Parklücken manövrieren muss. Deartige Umschalter kann man auch fertig kaufen, kosten aber einiges mehr als wenn man das selbst mit dem Arduino realisiert und Spaß am Basteln hat.
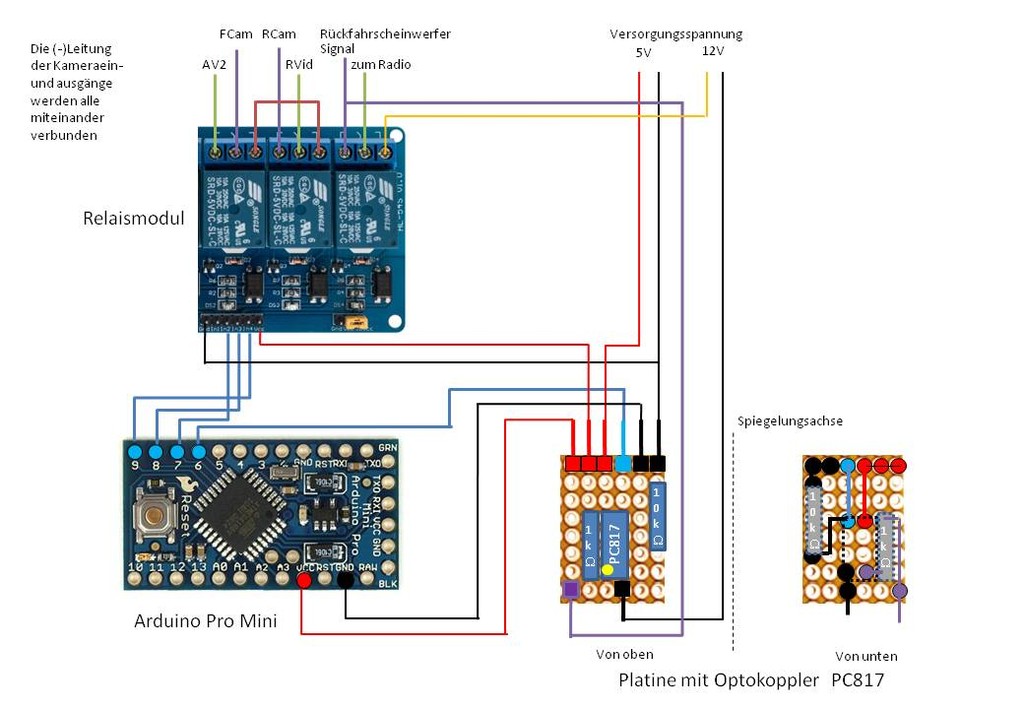
Als Hardware habe ich für das Projekt einen Arduino Pro Mini, einen Step-down Wandler für die 5V Versorgung des Arduino, 3 Relaismodule, einen PC817 Optokoppler sowie 10kOhm und 1kOhm Widerstände eingesetzt (Kosten ca. 15 €). Die Front- bzw. Rück-Kamera werden an zwei Relais so angeschlossen, dass bei ausgeschaltetem Relais Durchgang zu den entsprechenden Eingängen des Navireceivers besteht. Bei angezogenen Relais wird das Signal der Frontkamera mit dem Eingang des Navireceivers für die Rückfahrkamera verbunden. Das dritte Relais verbindet im offenen Zustand den Eingang des Navireceivers mit dem Steuerungssignal vom Rückfahrscheinwerfer, im angezogenen Zustand schaltet das Relais auf eine 12V Versorgungsspannung um. Der Arduino misst nun kontinuierlich über einen Optokoppler, ob auf der Steuerleitung vom Rückfahrscheinwerfer Spannung anliegt. Da die interne LED des Optokopplers nicht überbelastet werden darf, muss in die Steuerleitung ein 1kOhm Vorwiderstand eingebaut werden. Der Optokoppler ist notwendig, weil der Arduino auf 5V läuft und nicht direkt mit dem 12V Niveau der Bordelektrik beaufschlagt werden darf. Damit bei ausgeschaltetem Rückwärtsgang das Steuersignal zum Arduino schnell wieder spannungslos wird, ist die Arduinosignalleitung außerdem über einen 10kOhm Pull-Down-Widerstand mit Masse verbunden. Wenn der Arduino über diese Schaltung nun merkt, dass der Rückwärtsgang ausgekuppelt wurde, schaltet er die Relais um auf den angezogenen Zustand. Dem Navireceiver wird über die dann anliegende 12V-Versorgungsspannung vorgegaukelt, dass weiterhin Rückfahrbetrieb herrscht und der Rückfahrvideoeingang zeigt das Bild der Frontkamera. Nach programmierbaren 15 Sekunden schaltet der Arduino die Relais wieder aus und der Normalzustand ist wieder hergestellt, d.h. der Navireceiver zeigt seinen Home-Bildschirm bzw. das gerade laufende Navigationsprogramm. Im Arduino-Code muss noch Sorge getragen werden, dass ein erneutes Einlegen des Rückwärtsgangs während der 15s Vorwärtsfahrt die Frontkamera Schaltung abbricht und das Signal der Rückfahrkamera wieder erscheint, d.h. die Relais wieder auf den "offenen" Normalzustand geschaltet werden.
Hier ein paar Bilder des Umschalter-Kästchens:



Und der Schaltplan sollte auch nicht fehlen:
Ich hoffe, damit ein wenig Anregung gegeben zu haben!
lemes